
- 适应时代需求的panasonic(神视)伺服电机

- 适应时代需求的panasonic(神视)伺服电机
适应时代需求的panasonic(神视)伺服电机
电机概述:
采用2自由度控制方式的A5Ⅱ系列,因为前馈控制与反馈控制可以分别调整,针对指令“缩短”和通过缩短抑制振动的“减小”,
缩短了整定时间,实现低振动化。实现了电子零部件实装机的节拍高速化,提高了金属加工机器的表面加工精度,工业用机器人能够快速流畅地运行。
采用提高加工精度和性的新算法“2自由度控制方式”
由于以往的模型不能对前馈控制和反馈控制进行个别调整,即使调节“缩短”的前馈控制时,
在反馈控制下“减小”控制也会相应变动,所以需要针对它们相互之间再做调整。
发挥机器潜能的伺服电机。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,
可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,
当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
操作性大幅度提高,能简单使用「PANATERM」
设备和装置启动时,需要调整伺服电机、驱动器的情况下,为了便于设定参数与监测等升安装支持软件「PANATERM」。使画面更加清晰。
搭配可实现快速安装的适合增益
新开发出能限度发挥A5Ⅱ系列特性的适合增益功能。当装置刚性低时能够降低振动的自适应陷波滤波器功能,以及能自动设定调整适合的各种增益。
实现快速且正确的操作 高速响应·高精度定位
产品原理:
A5II系列 : 2自由度控制方式 全功能型
(位置・速度・转矩・全闭环控制型)
A5IIE系列 : 2自由度控制方式 位置控制型
A5系列 : 速度・位置・转矩・全闭环控制型
A5E系列 : 位置控制型
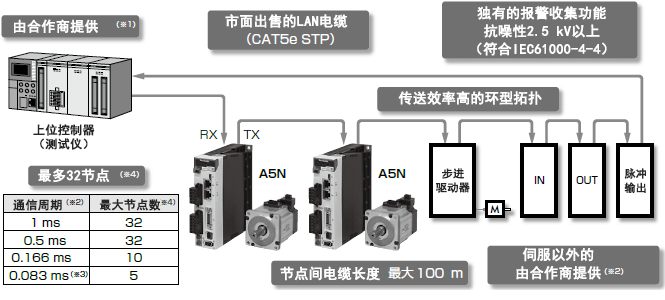
A5IIN : 超高速网络通信型伺服 (RTEX)
系统结构例
适应时代需求的panasonic(神视)伺服电机
